Learning for ASVs
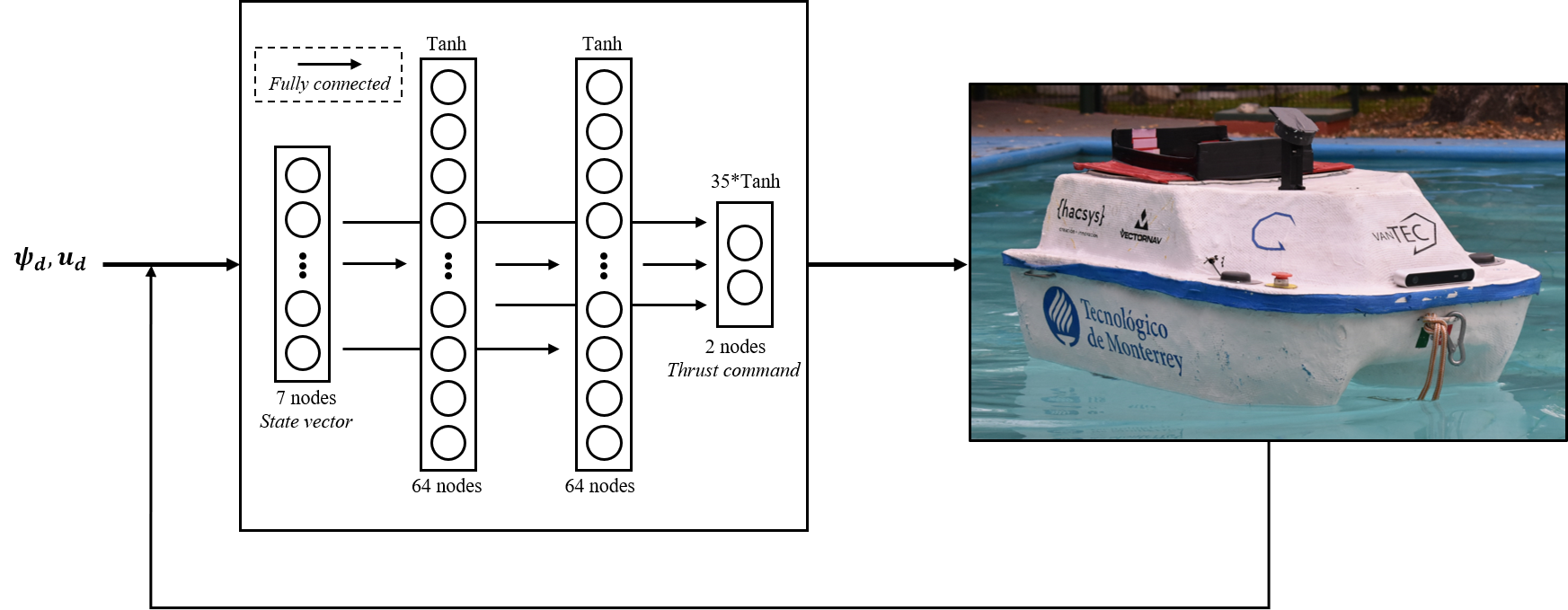
Deep reinforcement learning for autonomous surface vessel control under disturnamces.
The complex nature of the ASV dynamics is an issue to develop mathematical models and design control systems. Since Deep Reinforcement Learning uses neural networks to learn a policy by interacting with its environment, how can they be applied for ASV autonomous behavior?
Related Publications
2023
2021
-
 Adaptive dynamic programming and deep reinforcement learning for the control of an unmanned surface vehicle: Experimental resultsControl Engineering Practice, 2021
Adaptive dynamic programming and deep reinforcement learning for the control of an unmanned surface vehicle: Experimental resultsControl Engineering Practice, 2021
2020
- USV Path-Following Control Based On Deep Reinforcement Learning and Adaptive ControlIn Global Oceans 2020: Singapore – U.S. Gulf Coast, 2020